ロボットの組み立てもアプリのインストールも終わりました。
組み立てが終わってプログラムを始めて動かすときは、一番最初にロボットの調整を行ってください。そうしないと、クムクムはちゃんと歩いたりすることができません。
組み立てたばかりのクムクムをこれからちゃんと歩いたりできるように細かな調整をしましょう。
目次1. 部品の名前と機能
箱の中に入っている部品
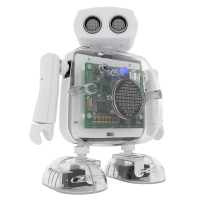 | 【クムクム本体】
箱の中のバラバラなパーツを組み立てて完成するロボットです。スクラッチで作るプログラムによって、歩いたりしゃべったりとてもかわいい動きをます。無線通信により20mくらい先まで届きます。 |
 | 【通信機】
パソコンのUSBケーブルを頭の部分に挿してクムクム本体とコマンドの通信を行います。 |
 | 【マイクロUSBケーブル】
通信機とパソコンを接続するためケーブルです。 |
2.ほかに必要なもの
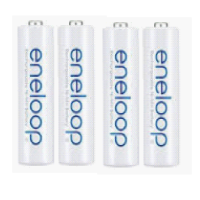 | 【ニッケル水素充電電池】
クムクム本体の背中に装着する単三の大きさの充電式電池4本が必要です。 |
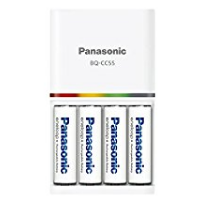 | 【充電器】
電池を充電するための充電器が必要です。 |
2. 使う前の注意
電池は必ず指定されたニッケル水素充電式電池を使うこと。絶対にコンビニなどで売っている普通のアルカリ電池を使わないでください。
※アルカリ電池の力ではクムクムはうまく動くことができません。とても変な動きになって、怪我や壊れてしまう原因になります。
クムクムの足や手が動いているときに、自分の手や指などを近づけて挟まれないように気をつけてください。また、モータが動くときは、本体を手で持ち上げないでください。
※クムクムの足や手にはすごく強いモータが使われています。手や指を入れるとケガをすることがあります。
本体や基板や電池などを水に濡らしたり、濡れた手などで触らないでください。また、水の多い場所に近づけないでください。汚れた場合などは、本体の電源を切ってから、乾いたタオルなどでやさしく拭いてあげてください。
※クムクムには電気が通っています。感電する恐れがあります。
クムクムの顔や手、足などをむりやり手で回さないでください
※むりやり手で回すと、モータを壊す恐れがあります。どうしても手で回したいときは、電源を切ってからゆっくり回してください。
赤ちゃんや小さなお子様の手の届かないところで使ってください。
※特に電池は危ないので気をつけてください。通信機は口に入る小さなものです。注意してください。
保護者の方へ
この製品は、モータや充電式電池を使用した電化製品です。特に、充電式ニッケル水素電池は、メーカの推奨する使い方以外で使用すると発火など重大な事故につながることがあります。充電方法など、必ずメーカの説明書をしっかりお読みいただきお使いいただきますようお願い申し上げます。
本製品をご利用いただいた上での、いかなるケガや事故などについて、弊社では責任を負いかねます。ご使用前に、あらかじめ使用許諾条項をしっかりお読みの上ご使用ください。
3. 準備をしよう
ロボットの組み立てが終わり、ソフトウェアのダウンロードやインストールが終わったら、いよいよパソコンとロボットを動かしましょう。
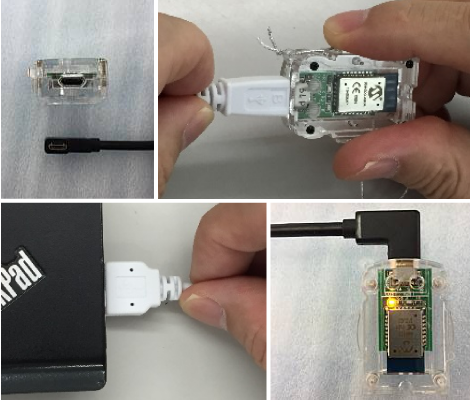
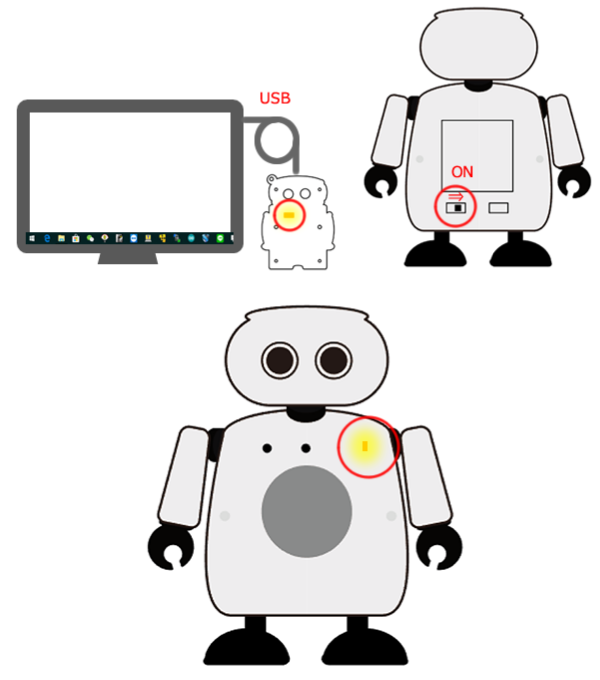
①パソコンと通信機を接続しましょう
箱の中のUSBケーブルと組み立てた通信機をパソコンのUSBポートに接続します。USBのコネクターは、正しい方向で接続すると簡単に接続できます。硬いのに無理やり押し込んだりすると壊れてしまいます。慎重にゆっくりやりましょう。接続が正しくできると通信機の黄色いLEDが光ります。
※正しく接続しても通信機のLEDが光らない時は、ほかのUSBポートやパソコンで黄色いLEDが光るかを試してください。
どうやっても光らない時は通信機が壊れているかもしれません。
その時はセンターにお問合せください。
②本体に電池をセットしましょう
クムクム本体の背中のフタを外して、方向通りに電池をセットします。電池は、ちゃんと充電したものを使ってください。

電池をセットしたら、いよいよスイッチをONにして、ロボットに正しくパワーが入るかどうかを確認しておきましょう。正しくパワーが入ると、クムクムの左胸の黄色いLEDが光ります。

※もしLEDが光らないときは、電池の方向と充電がちゃんとできているか調べてみましょう。
通信機とクムクムのLEDが光ったら準備はOKです!
4. ログインしよう
①Qumcumアプリを起動
インストールしたパソコンのデスクトップにあるクムクムのアイコンをダブルクリックしてアプリを起動しましょう。
②USER ID とPASS CODEを入力して「LOG IN」をクリック
USER IDとPASS CODEはどちらもローマ字小文字で、local(エル・オー・シー・エイ・エル)と入力します。
※Qumcum(クラウド版)を使っている人は、ユーザー登録をしたときに決めた文字を入力します。
入力したら「LOGIN」をクリックしましょう。

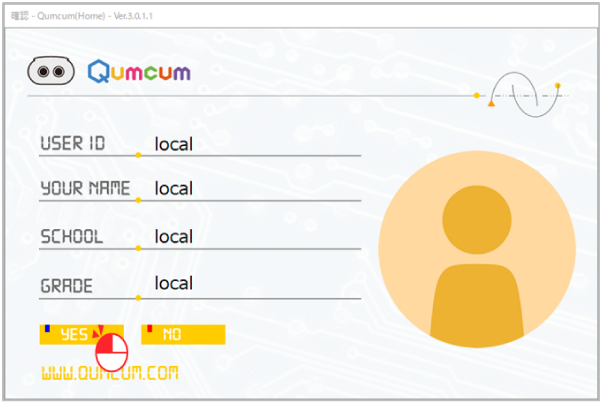
③「YES」をクリック
確認画面では、全部が「local」になっています。確認したら、「YES」をクリックしましょう。
5. クムクムをチェックしてみよう
工場から出たモータは、90度にセットされています。しかし、組み立てたり、動かしたりしていく内に、少しずれたりします。まずは、今のクムクムがちゃんと90度になっているかどうかをチェックしてみましょう!
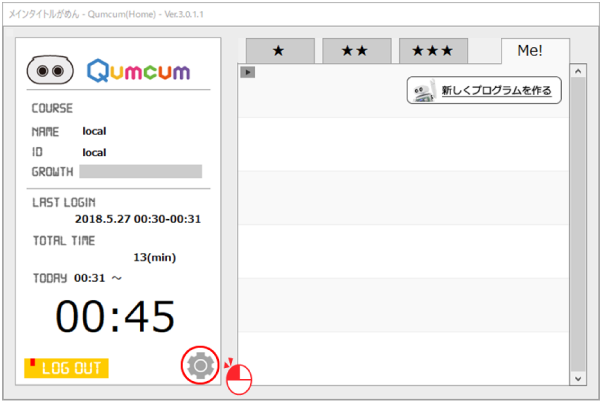
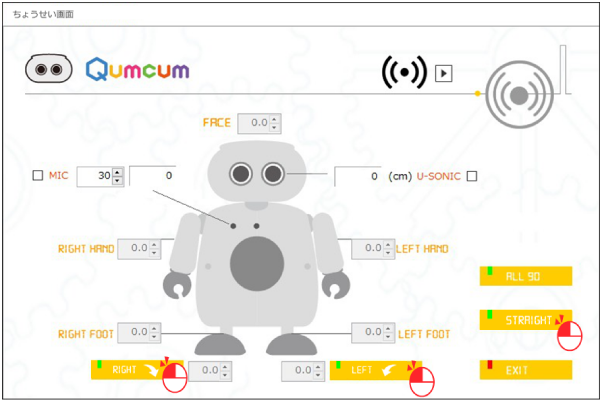
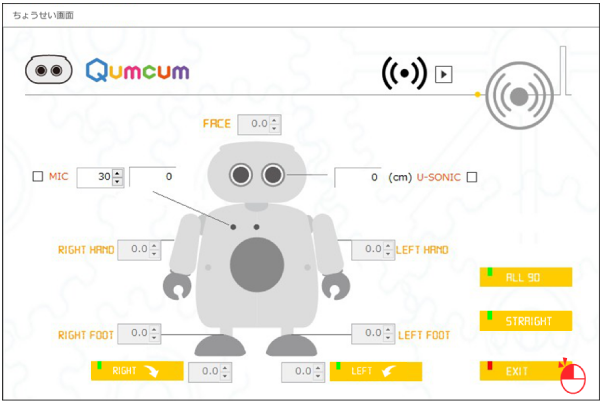
①画面下の歯車(調整アイコン)をクリック
メインタイトル画面がでたら、画面下の歯車(調整アイコン)をクリックしましょう。
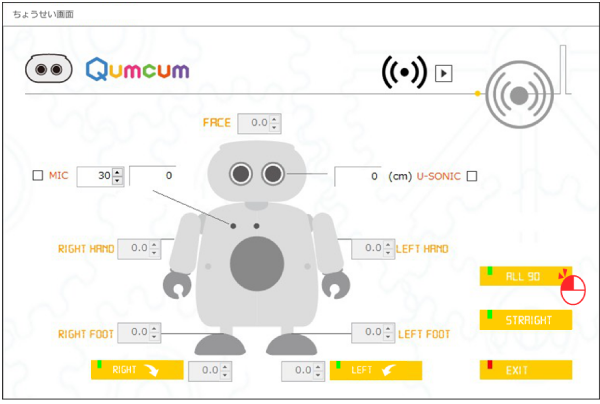
②最初に全部を90度にする
顔・腕・足の方向のモータをチェックするために、まず[ALL90]のボタンをクリックします。
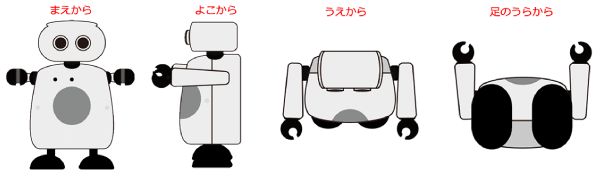
[ALL 90]のポーズです。すべてが大体下のようにまっすぐならOKです。
ちょっとでも下のようにずれていたら…
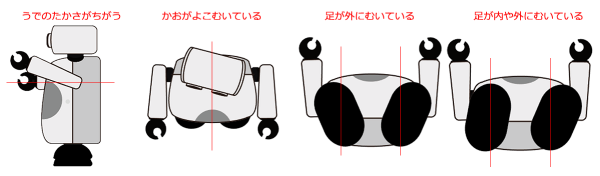
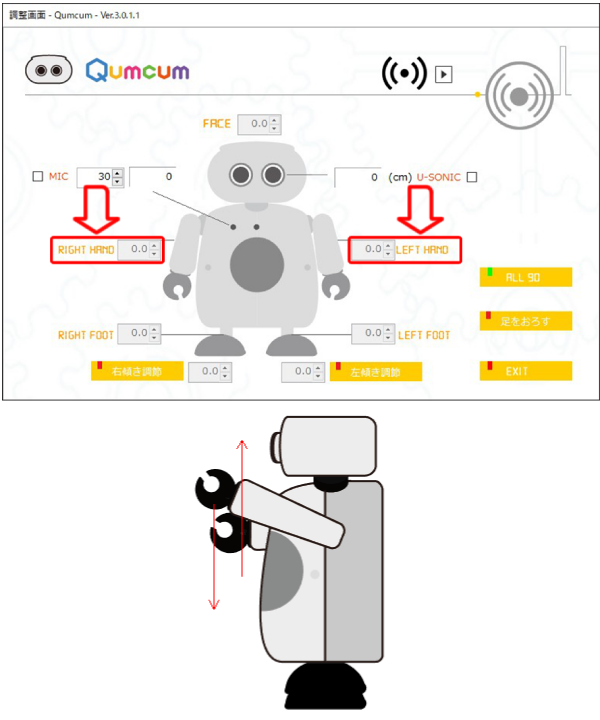
腕が高さが違う⇒腕の調整をする
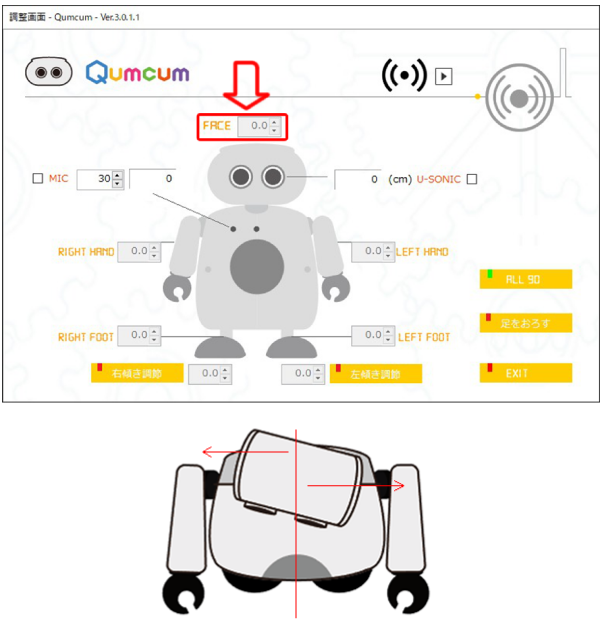
顔が横向いている⇒顔の調整をする
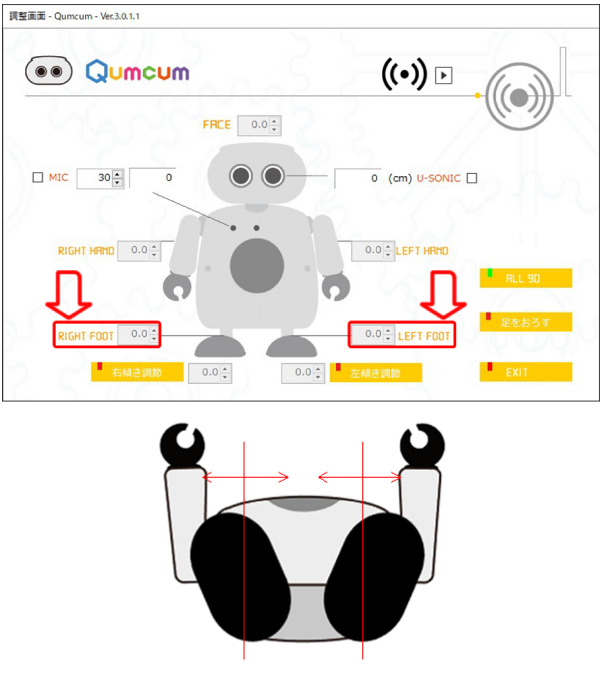
足の裏が内や外に向いている⇒足の調整をする
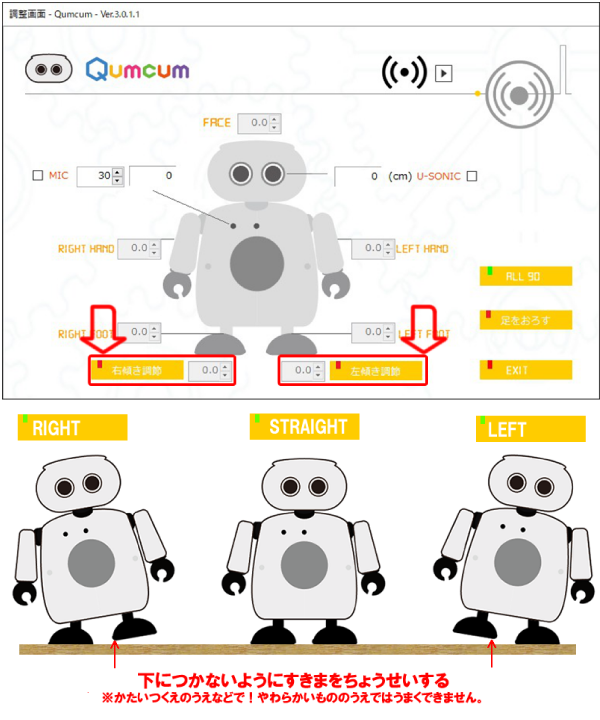
③ちゃんと片足で立てるかをチェック
[LEFT] [RIGHT][STRAIGHT]ボタンをクリックし、片足で立てるかどうかをチェックしましょう。
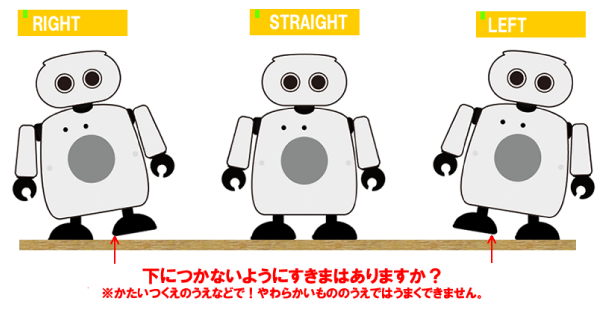
チェックをしたクムクムが何かおかしかったら調整をしましょう!
④それぞれの角度を調整する
数字の横の▲▼ボタンをクリックしながら少しずつ角度を調整して、正しい90度のポーズにできるだけ近くなるようにします。
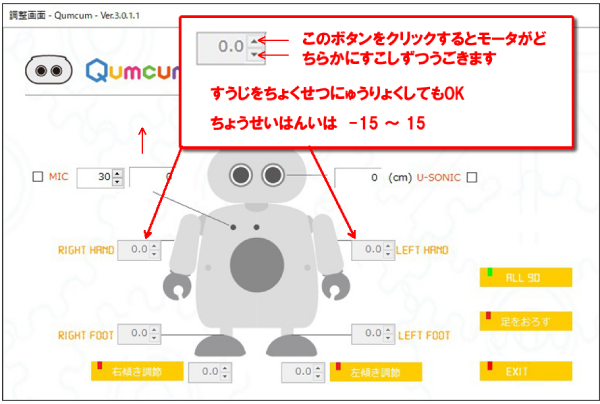
腕の調整
顔の調整
足の調整
足の傾きの調整
⑤マイクとセンサーをチェックする
マイクレベルを合わせる
なにも声をかけないときはレベルが0になって、「あ~」と大きな声をだしたときにレベルが100に近くなるように、感度の数字をかえましょう。

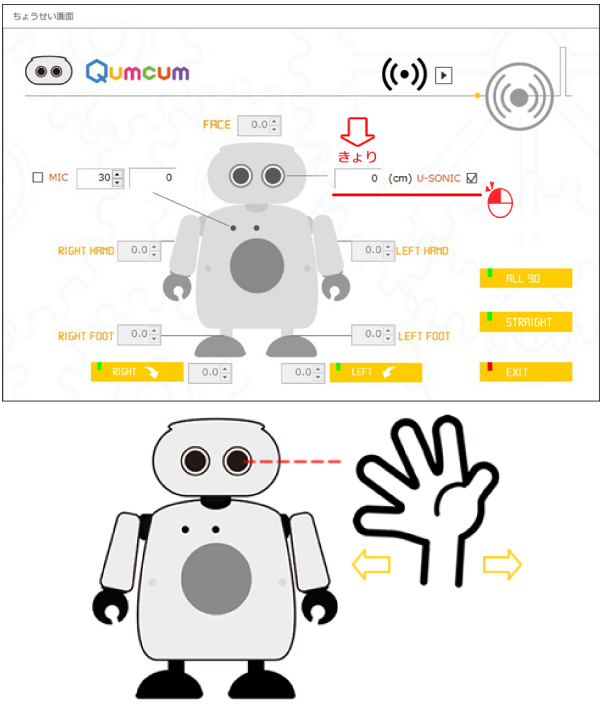
距離センサーの確認
目の前に手のひらを近づけて、距離の数字が0~30まで変わるかどうかみてみましょう。30cmより遠いと999と表示されます。
⑥調整を終わる
[EXIT]をクリックして、調整画面を閉じます。
クムクムロボットを動かす準備ができたら、次は実際にプログラムを作って動かしてみます。下の「クムクムのプログラムをつくろう」をクリックして進みましょう。
